TEPIA 先端技術館
- HOME
- TEPIA 先端技術館
- TEPIAチャレンジ助成事業
- 経過・結果レポート一覧
- TEPIAロボットグランプリ2016 レポート①

経過・結果レポート
TEPIAロボットグランプリ2016 レポート①
2016.11.30
2016年11月13日(日)、TEPIAチャレンジ助成事業の成果発表大会「TEPIAロボットグランプリ2016」が
TEPIA先端技術館で開催されました。当日の様子をレポートします!
第1回目の今回は、助成事業採択チームの全10チームが開発成果披露に集いました。

開会式では審査委員長・古田貴之氏の貴重な講演も!
日本のみならず、世界の「現場」で活躍するロボット開発のお話に、参加者全員が熱心に耳を傾けます。

そしてまもなく成果発表・午前の部がスタート。
成果発表は、ロボット実演 3分、プレゼンテーション6分 という時間制限の中行われました。
トップバッターは中学生のみのチーム、
追手門学院大手前中学校 ロボットサイエンス部の木登り枝打ちロボットOtemon Wood Cutter Robot。

回転しながら木を登り、切った枝を回収する「木登り枝打ちロボット」。
林業の抱える問題を解決すべく、良質な木を育てるための“枝打ち”を安全に行い、効率良く回収する工夫も盛り込んだロボットを開発しているチームです。

ジャイロセンサーやモーターの設定で躯体を水平に保つ工夫や、雨水に耐える工夫も。
課題についてよく調べている問題意識の高さや、
さらなるバージョンアップのための課題意識の高さに感心する審査員。
「完成度が高いものをレゴ主体で作っていてビックリ。これから自分たちで作ることもしていって、ぜひ実用化してほしい」
と伸びしろに期待するコメントが多数ありました。
続いての発表は2校の開発者2名によるチーム、
宝仙学園高等学校共学部理数インターと東京インターハイスクール ロボット同好会のSuNClass。

黒板消しや描画の機能を持つ、授業のサポートをするロボット作りを目指しました。

クリーナーを搭載したロボットは、タッチセンサーに触れると来た方向に戻り、
ラックギアを使って、タテ方向だけでなく横の動きも再現し、ペンを使った描画の機能も持たせたいというプランでした。
様々な機能を搭載したロボットの開発を目指しましたが、それを「実現する」ことって難しい。
「やってみないとわからない」、開発中に学んだことをどんどん次にいかしてほしいですね!
続いて、初心者からロボット開発をスタートした
三田国際学園高等学校 inanimate object開発チームの inanimate object~無生物~。
「円柱を移動するロボット」の開発に挑戦しました。
4つのサーボモーターを連動させて動かしています。
チーム全員がプログラムを書いたことがないという状況からのスタートで、
「プロトタイプを試作し、それを動かすプログラムをまた1から作るのが大変でした。
レゴを金属製に変えるのが一番大変でした」と、ロボットを作る難しさと面白さを経験した成果発表に、
「がんばりに座布団一枚あげたくなる」と審査員の方々。

続いては、中学生が中心となり、高校生のアドバイスも受けながら開発をした
清風南海学園 科学研究部の「地震災害時における高層ビル探索ロボット」。

災害時、人の代わりに自動で高層ビル内を探査し、現場の情報を発信するロボットです。
超音波、ジャイロ、光センサーなどを搭載し、穴を降下する際はクローラーが閉じ、壁を伝って降り、
走行中熱源を認識すると外部に知らせたり、各フロアの情報をメモリに保存し効率よくビル全体を探索できるようプログラムしています。

実演中、ロボットの不具合で探査の動きをデモできず、残念でしたが、
「色々盛り込みすぎたのかもしれないね。でもしくみはすごく面白い。頑張っているのもよくわかる。」と
古田審査委員長からエールが。
そして次は、
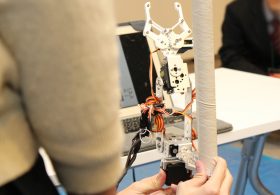
神戸市立科学技術高等学校 機械工作部の「のぼるん」。

ロープを掴み、昇り降りするロボット。
競技ロボコン優勝経験のある同校ですが、
人に見せる・人を楽しませるロボットを作りたい、と生み出されたのがこのロボットです。

しっかりロープを掴み、安定した動きで昇り降りする様子に、会場からも感嘆の声が。
この「掴む」機構の開発へのチャレンジ、その技術力と完成度が高く評価されました。
「君たちだったらもっともっとできる。
メカ以外の部分も(センシングや自律)頑張ったら、もっとすごいものが作れる!」
と、審査員の方々の期待がとても大きい様子でした。

(成果発表・午後の部のレポートは、②に続きます。)