TEPIA 先端技術館
- HOME
- TEPIA 先端技術館
- TEPIAチャレンジ助成事業
- 経過・結果レポート一覧
- ロボットグランプリ2019レポート②

経過・結果レポート
ロボットグランプリ2019レポート②
2019.11.22
レポート①に続き、「TEPIAロボットグランプリ2019」の開催レポート後半です。
【午後の部】
⑥サレジオ学院高等学校 自然科学部物理班 「OverMoth」

テオヤンセン機構を使って、動物のような動きをする、人とコミュニケーションをしながら一緒にお掃除をするロボットを作ったら面白いだろうと
考えられたロボット。 試作機を作って問題点を洗い出し、完成機の製作に活かしました。
ロボットが自力で乗り越えられる段差であれば乗り越え、乗り越えられないものについては、手足をバタバタと動かし「ごねる」動作でアピール。
使用者にその障害物をどかしてもらう、そのことを習慣にすることで、人間が床に物を置かなくなり、結果的に部屋がきれいになる、
ということを狙ったのだそうです。
実演では、若干、人力での軌道修正はあったものの、ノートパソコンを乗り越える動作や、乗り越えられない障害物の前でごねる動作が見られました。
「お掃除ロボットを作りたかったというよりは、テオヤンセン機構に挑戦したかった」という本音が見える解説に笑いが起こる場面もありました。
生き物のような動きがとても面白かったです。
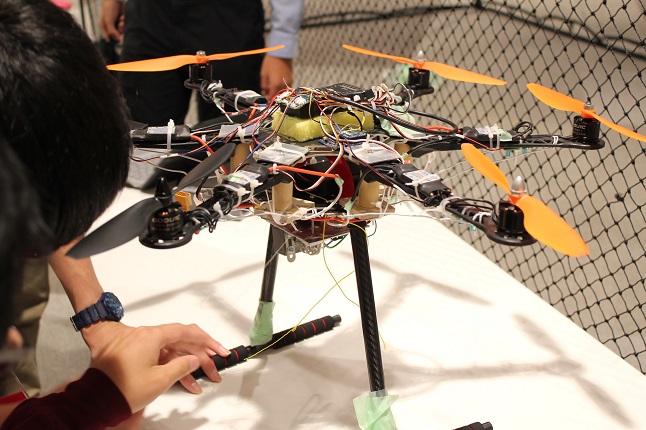
⑦東大学園中学校 電子工作部 「ヘキサキャリア」

山が近くにある環境から、現在広がりつつあるドローンの輸送を山や土砂災害時でも使えるようにできないか、という考えから開発を始めました。
まずは試作機を作り、本作機を作る前の問題を洗い出すことから始め、山で飛ばすときの条件からどのような出力が必要かを考えて
本作機を作りはじめたとのこと。 制御コントローラーやGPSモジュールは既成のものを使用しましたが、
それらがきちんと動作するように振動などを抑えるメカニズムを努力して製作しました。
性能は、1Kgの荷物を積載、ホバリング状態で荷物の上げ下ろし、GPSによる自動飛行、約15分間の飛行が可能とのことで、
実際に奈良県の若草山の中腹から下方へ200mの地点までを往復約3分の飛行に成功し、その映像も公開されました。

実演では、室内なのでGPSが使えないことから、コントローラーによる飛行となりましたが、
ホバリング状態での荷物の上げ下ろしの部分を見せることができました。
完成度が高く、見事、今回のグランプリを受賞しました。
⑧京都府立桃山高等学校 グローバルサイエンス部ロボット班 「SEC(Step Exceed Chair)」

近年、福祉用具の需要が高まっていると感じ、車いすに着目。
車いすの問題点をいくつか考えていく中で、段差を越えられる車いすを作ろうと開発を始めました。
段差を越える際に斜めにならず、電力の節約を考えて手動でも動かすことができ、キャタピラを使わない、をコンセプトに、
車いすの左右に車輪を3つずつ取り付け、それぞれがリニアアクチュエーターで上下することで、段差を登るという仕組みです。
現在は最大15センチまで登ることが可能とのこと。


実演では、先端の車輪についたタッチセンサーが段差に反応してプログラムが作動し、段の上に車いすが登るまでを見ることができました。
「実は、車いすで15センチくらいの高さは簡単に登ることができる」ということで、問題設定に対する指摘もありましたが、
これだけの大きなものを動かすことができたことには賛辞が贈られていました。
⑨追手門学院大手前中学校 ロボットサイエンス部 「あいドッグ」

福祉に貢献するロボットの開発を目指し、また、盲導犬が不足している現状を考えて、盲導犬の代わりになるロボットの開発を始めました。
点字ブロックに見立てた黄色い線の上を動き、T字の部分では止まる、色を認識するカメラで信号機の色を認識して青色の時に動く、
人とのコミュニケーションとして頭をなでたりあごをなでたりすると反応する機能を付けました。


実演では、黄色い線の上を動き、T字部分で止まるところや、黄色い線上に障害物があった時に避けて動く様子、
信号機が青になったら動くという機能の他コミュニケーションの部分も見ることができました。
信号機の色の認識など、実際の環境で使用する際にはもっと困難があるので、いろいろと試した方が良いというアドバイスもあり、
今後の開発につなげていただきたいです。
⑩神戸市立科学技術高等学校 機械工作部ROBO 「カゴロイド」

重い荷物を運んで人についてきてくれるロボット。
その開発は、一昨年、TEPIAロボットグランプリに出場した際に製作した「ハコロイド」の弱点である
「誰に追従するのかを識別できない」「階段を登れない」という点を克服することから始まりました。
段差を越えるために四足歩行を可能にし、また、変形機能を付けて車輪走行も可能にすることで平地での安定した走行と移動速度の向上を実現しました。
人の追尾については、特定のマーカーを認識するプログラムを作り、そのマーカーを追尾することに成功しました。

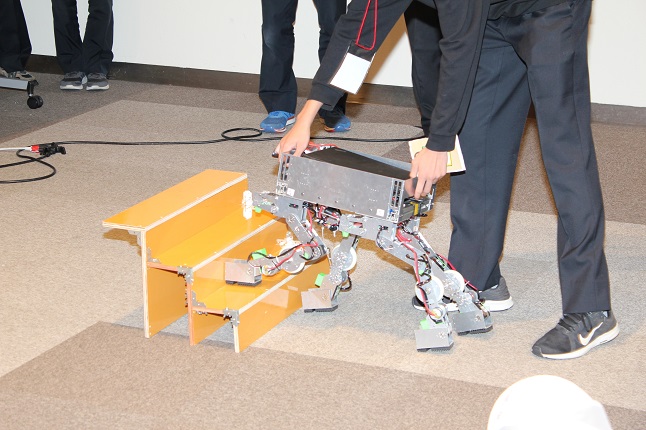
実演では、四足歩行モードから車輪走行モードに変形するところ、マーカーを追尾するところが見られました。
階段を登るところは残念ながらバランスを崩してしまい、成功しませんでしたが、階段を登り切った想定で、
再度車輪走行モードに変形するところまでをデモしました。
サーボモーターの使い方のアドバイスなどもあったので、今後の開発に生かして欲しいと思います。
これで全チームの発表と実演が終了しました。参加チームの皆さん、ありがとうございました。