TEPIA 先端技術館
- HOME
- TEPIA 先端技術館
- TEPIAチャレンジ助成事業
- 経過・結果レポート一覧
- ロボットグランプリ2018レポート④

経過・結果レポート
ロボットグランプリ2018レポート④
2019.01.24
(レポート③からの続きです)
⑨富山県立砺波工業高校 電子工学部2年生チーム 5$’s
「風船PonPonプリンター」

砺波工業高校電子工学部では、各々が様々な大会に出場していますが、今回の5人でチームを組んでロボットを作るのは初めて。
地元砺波市でのチューリップフェアのロボットイベントや“おもちゃの病院”のボランティア活動などをしている今回の5人で、子どもたちに喜ばれ、皆を盛り上げる「風船PonPonプリンター」を作ることになりました。
メンバーにとってアプリ開発とそれに連動するマシンの開発は初めての挑戦でした。
自作のスマホアプリから文字や図形のデータをロボットのマイコンに送信し、
受け取ったデータから、ロボットがペンを動かし、風船を回しながら、アプリに描いた図形を描いてくれます。
開発では、まずピンポン玉にペンで文字を描く試作機をつくってみるところからスタート。文字を描くことに成功。
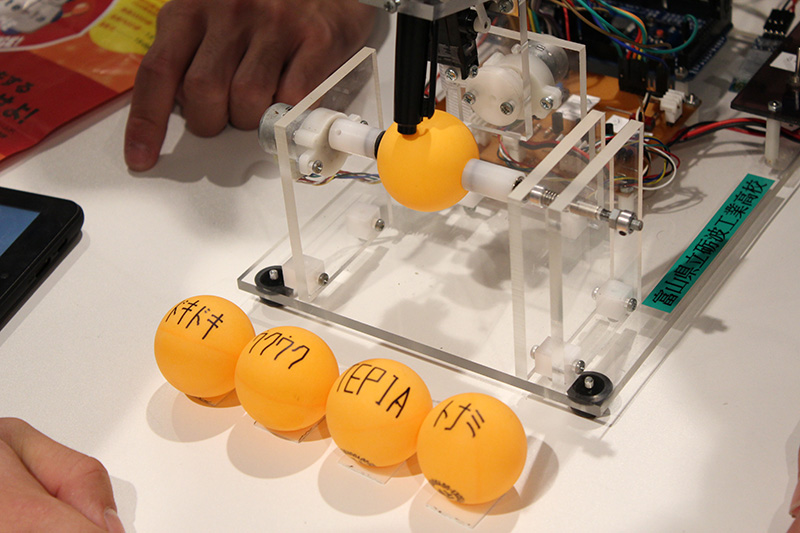
しかし、同じやり方でも「風船」になると、風船はピンポン玉などと違いきれいな球形ではなく、弾力があるため、ペンをあてて正確に描写することに苦労しました。
弾力でペン先が沈み込んでしまったり、風船とペンの摩擦で風船がうまく回らなかったり。
風船をできるだけ球に近い一定の形になるようにする、ペンを上下するのではなく前後させる、モーターとギア比を変更してトルクを強くさせる…などなど、うまくいかない原因を探りながら、どうしたら解決していけるか、試作と修正を重ねて風船という題材に挑みました。
スマホからロボットのマイコンにデータを送る方法は、文字コード転送、座標データ転送の2種類を作り、受け取ったデータをロボット側で呼び出し変換・制御し、風船とペンの動きだけで描写をうまい具合に再現できる方法を自身で考え作り上げました。
風船を一定の大きさに膨らませるパーツも自作し、
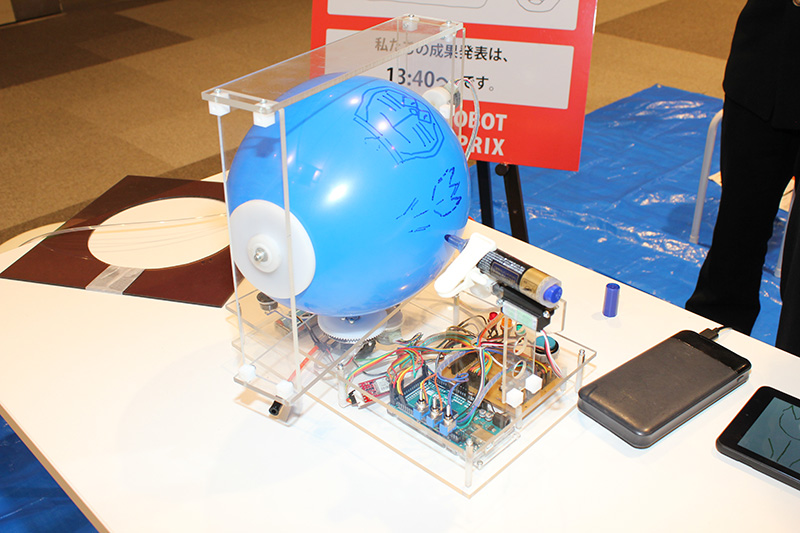
膨らませるところから、タブレットで描画して、ロボットがその絵や文字を風船に描いてくれる…という一連の動きをパフォーマンス。

風船とペンの動きだけでスルスルとスムーズに描かれたドラえもんに、拍手がおきました。
直線描写の組み合わせで、砺波市の特産品・チューリップの描写もデモ。

まさに、皆をワクワクドキドキ楽しませるロボットの完成ですね!
⑩追手門学院大手前中学校
ロボットサイエンス部 Otemon Quest
「体と心に栄養を届ける食事介助ロボット もぐもぐくん」
食事介助にかかる負担を、科学で解決したい。
患者さんや介護を受ける人にも、大好きな人と食事をする幸せを届けたい。
看護師の仕事をしている、メンバーの母親の「患者さん一人に対して、食事介助に40分程度の時間がかかる」という現場の課題から、
多くの人に“幸せな食事シーン”を届けるロボットを作りたくて開発したのが、「もぐもぐくん」です。
ロボットアームが患者さんの口元までスプーンを運ぶことで、食事介助をしてくれるロボットですが、ロボットアームの動きと重なって、VRゴーグルを着けた患者さんには「大好きな人」の姿が見え、まるで大好きな人に食事を食べさせてもらっているように感じることができるのがポイントです。
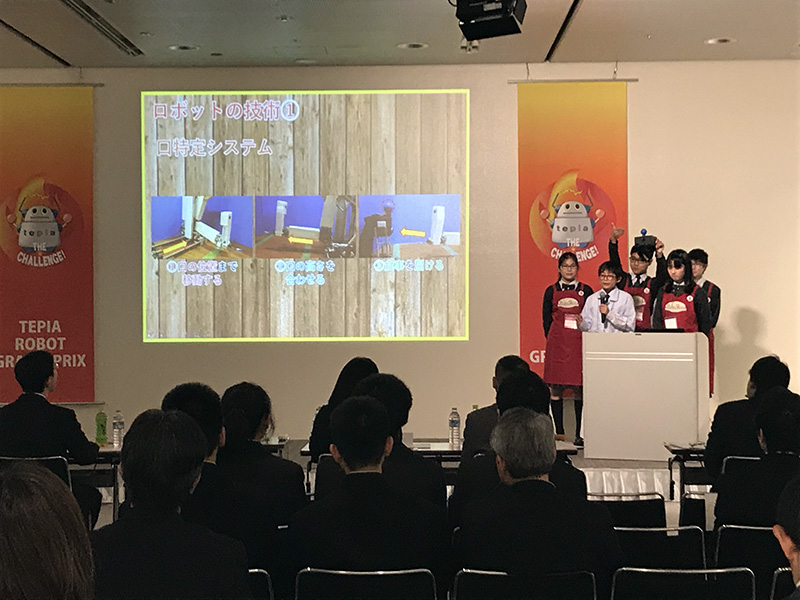
患者さんの口までスプーンを運ぶには、患者さんの顔や口の位置を正確に認識する必要があります。
「口特定システム」として、色のついたボールを追うことに特化したカメラを用いることで、ゴーグルについたボールの動きにより顔と口の位置や距離を特定します。
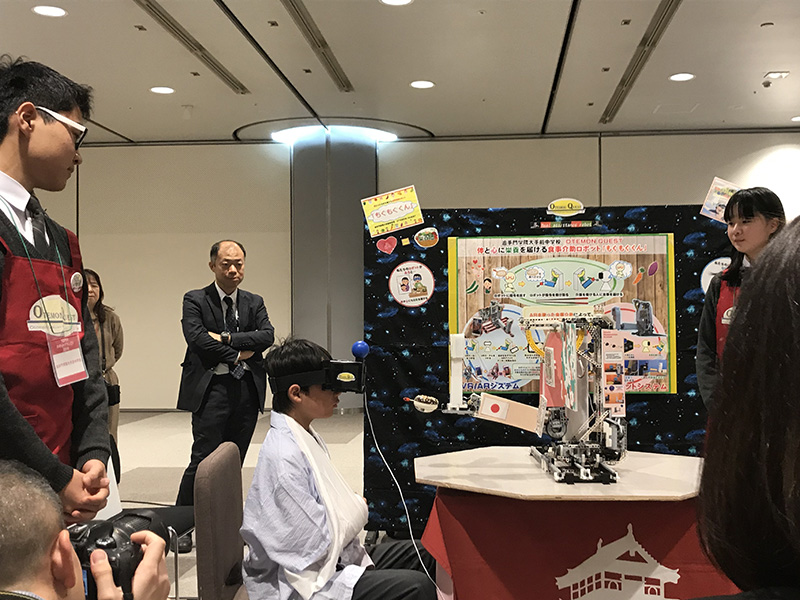
そして、無機質なロボットの介助への恐怖心や、介護に人の温かみを感じたいという声は多くあり、これを解決するために、AR、VRを使って、患者さんの目の前に大好きな人の姿を現すことができないかと考えました。
Unityで一からアプリを作り、ロボットアームにつけたマーカーとARで出現する「お母さん」の腕が連動して一緒に動きます。

VRで「お母さん」の姿をより立体的にみせるため、画面を一画面から二画面にするこだわりも。
ロボットの腕の動きと「お母さん」の動きを連動させることに一番苦労し、マーカーの微調整などに、7か月かかったそう。
VRゴーグルも自作です。

介護の問題は日本が抱える重要なテーマです。
「VRで好きな人の姿を見たり、声を聴きながら介助を受ける」というアイデアが、介助の場面に登場するロボットのイメージを変えていき、様々な問題を解決する一助になるかもしれません。
⑫東京工業大学附属科学技術高校
機械システム分野 仮想ハンドル班
「立ち乗りハンドルなし彦くん」
「パワードスーツを使っている人間の動きを把握したい」そして「今までにない操作方法の乗り物を開発してみたい」というのが開発のきっかけとなった「立ち乗りハンドルなし彦くん」。
自分の動きに合わせて機械が動いたり、新しい乗り物に乗れる、というのはワクワクしますね。
チームは、今回この新しい乗り物の開発を、仮想ハンドル(操作装置)とASAT(乗り物)の2つの機構から研究しました。
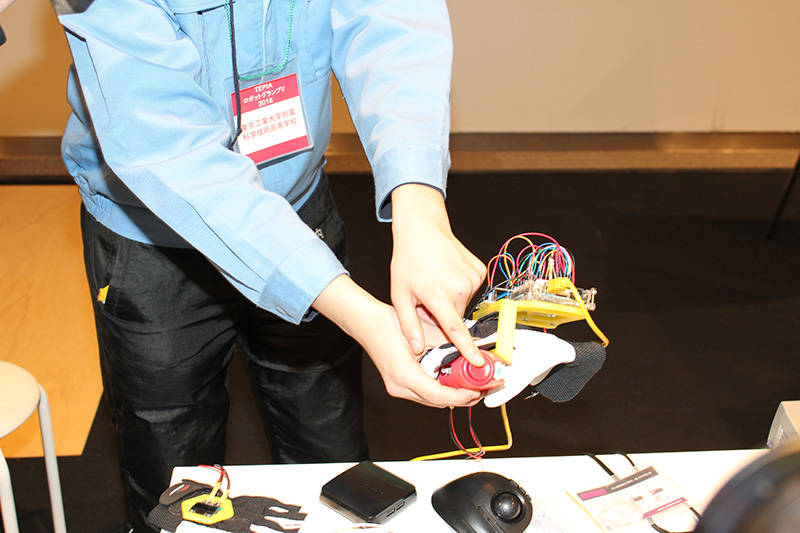
開発した仮想ハンドルは、手袋型のデバイス。
手袋型の仮想ハンドルにすることによって、直感的に、自身の手でハンドル操作をするように機械を操作することができます。
手の動きを把握する9軸センサと、9軸センサの情報などを表示する有機ELディスプレイを搭載。通信には、Twe-Liteを用いて、無線通信を可能にしています。

デバイスは、握りやすさを追求し3DCADで設計・3Dプリンタで出力、
クオータニオンを用いて手の正確な傾きを計測するプログラムを作っています。
デバイスから手首の動きのデータを送信して、移動装置を動かします。
手首をひねった方向へ移動するようプログラムし、小型の検証機を用いて、手首の簡単な動きで前後移動やUターンができることを実証。

検証では、通信によるタイムラグやデータの欠落がないことを確認。
こちらのチームは、緻密な検証のもとしっかりとデータ欠損や異常動作がないかを確認していたのが印象的でした。
この検証機を、人が直立状態で乗って平面走行できるように大型化したのが、ASATという3輪の乗り物です。
小型で高出力のインパクトドライバーを動力に利用しました。
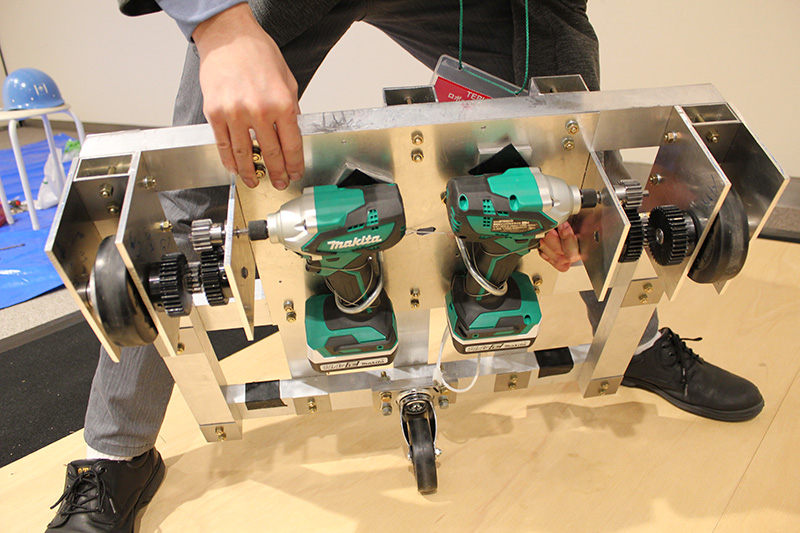
仮想ハンドルの握り検知機能や操作方法をさらに改良し、出来上がったASATとの通信には成功しましたが、ASATの速度調整の難しさ、完全に静止できないことなどから、ASATの安全性が最大の課題となり、現段階で人を乗せての走行や9軸センサの挙動の確認はできませんでした。
ASATの設計を見直し、速度が出すぎるため減速比を見直して最高速度を落とすこと、重量の軽量化、ブレーキの整備などが課題としてあがっています。
デモではデバイスの動きを受けてASATが動く様子を説明。
今後、安全性を高め、人を乗せて動いている「立ち乗りハンドルなし彦くん」を是非見てみたい、と多くの人が感じたのではないでしょうか。
人を乗せるというハードルは高いですが、とても緻密な計算や検証にもとづく設計や検証のスキルと経験、高い技術力を活かして、彼らが遠くない未来に仮想ハンドル構想を実現した乗り物の完成、あるいはこのデバイスを応用した新しいシステムを完成させていることを強く期待した開発成果発表でした。